![]()
遠隔鑑賞ロボットに関連する研究


遠隔鑑賞ロボット操作インタフェースの開発
目的
操作ログから鑑賞行為のモデル化を行ない感性表出データの確認を目的としているプロジェクトにおいて、KAPROSの操作そのものの「解りにくさ」が、ユーザの操作に極力影響を与えないようにする為の理想的なインタフェース提案を行うこと/インタフェースとしてわかりやすいもの提案を行うことを目的とする。


方法・解析
シミュレータ制作と制作したシミュレータを用いた印象評価実験を繰り返し、問題点の構築から実際に使用するスキンデザインとチュートリアルWebSiteの構築を行った。
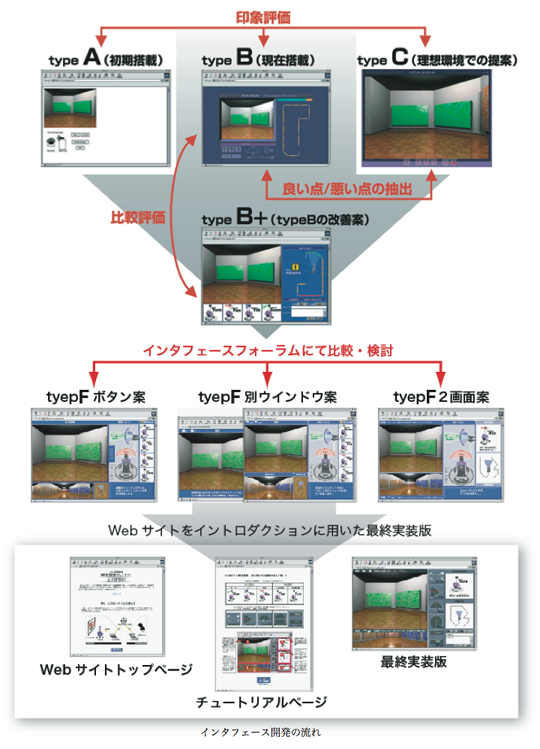
結論
特にTypeB からTypeB+への改善時に要素として追加された「アニメーション」という、テキストよりも、静止画よりも、膨大な情報量をもつメディアを利用し、インタフェースそのもの、システムそのものの理解度を向上させる事に成功した。また、タイムラグから生じる画面停止がユーザーに与える不安感の除去にも、このアニメーションを利用した状況説明が効果的に働き、結果として「わかりやすさ」が向上した。